
"Perdidos no Espaço" da vida real: vem aí o robô astronauta que faz de tudo
Reprodução
Na série norte-americana "Perdidos no Espaço", a família Robinson contava com a ajuda de um robô para executar tarefas durante suas viagens espaciais. Durante a viagem, os Robinson contavam com a força e a capacidade de calcular riscos do robô B9 para sobreviver no espaço. Em mais um desses momentos em que a vida imita a arte, a Nasa enviou para o a estação espacial ISS uma plataforma robótica para auxiliar as tarefas de astronautas dentro da cabine.
O uso de robôs na exploração espacial não é novidade. Já no final dos anos 60 tanto a Nasa quanto o governo soviético utilizou-se de robôs controlados remotamente para sondar a superfície lunar. Robôs semiautônomos têm sido bem-sucedidos na exploração da superfície marciana desde o final dos anos 90. A robótica esteve presente em missão não-tripuladas e tripuladas. Tanto o veículo espacial quanto a estação espacial possuem braços robóticos que auxiliam a tripulação durante caminhadas espaciais, reparos a satélites e manutenção das próprias espaçonaves.
Robôs espaciais são um pouco mais difíceis de se projetar por conta do ambiente hostil no espaço. Fora da proteção da atmosfera terrestre, chips de memória e processadores ficam vulneráveis a raios cósmicos capazes de alterar o valor de um bit de forma aleatória, podendo causar defeitos operacionais no robô. Esse tipo de problema pode ser evitado utilizando chips resilientes, mas esses chips costumam ser mais lentos que os chips de ponta utilizado em aplicações terrestres. Por causa disso, os robôs de gerações anteriores costumavam ser maiores e mais limitados em suas aplicações.
Nasa
A novidade na nova geração de robôs espaciais é o aproveitamento da miniaturização e evolução de processadores resilientes para acelerar o desenvolvimento de instrumentos que automatizam tarefas mais mundanas.
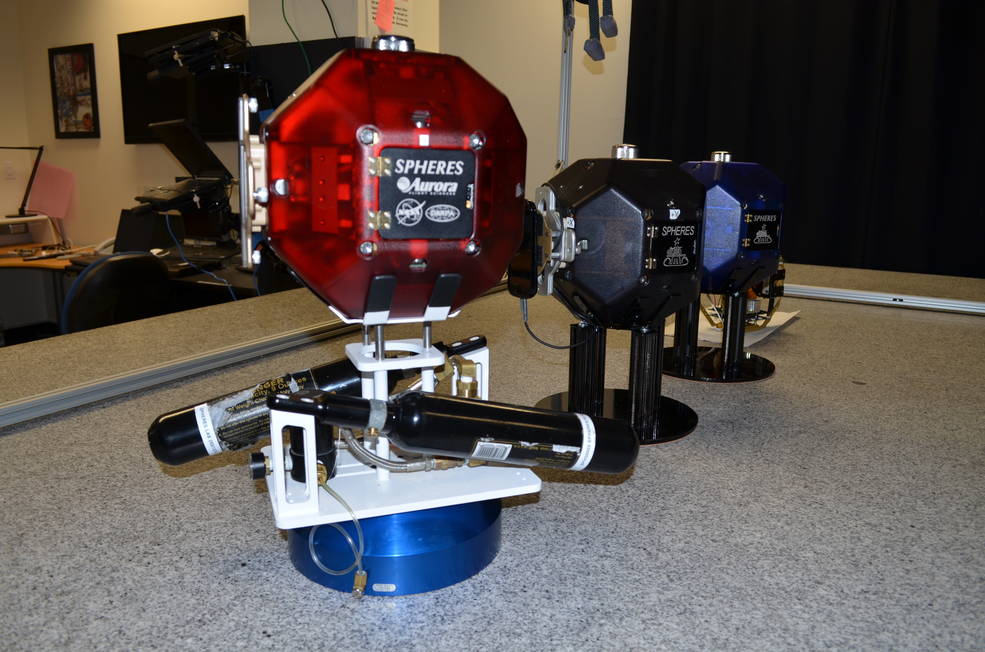
Um dos projetos da Nasa, o Spheres, conta com três microssatélites utilizados para realizar uma grande diversidade de tarefas e experimentos científicos a bordo da estação espacial. Em um exemplo, engenheiros foram capazes de demonstrar o uso desses microssatélites como reboques para capturar lixo espacial, auxiliar no reparo de outros satélites ou até mesmo transportar tanques com combustíveis ou outros líquidos. Se bem-sucedido, esse projeto poderá ser utilizado para minimizar riscos humanos de caminhadas espaciais durante a manutenção das espaçonaves e para ajudar na limpeza de lixo espacial.
Os astrobees foram projetos para realizar uma ampla gama de tarefas e a Nasa disponibilizou ferramentas para cientistas e engenheiros interessados em participar do projeto. Esse desenvolvimento de plataformas lembra o processo criativo propiciado pela primeira geração de Roombas. Se bem-sucedido, os próprios astronautas serão capazes de programar os robôs no espaço, de acordo com as suas necessidades mais rotineiras ou imediatas e liberando os humanos para executar tarefas mais complexas.
Robôs com pernas são bem mais complexos que robôs com rodas, por causa das dificuldades causadas pela necessidade de equilíbrio. Por outro lado, um robô com pernas é capaz de se locomover em uma grande variedade de terrenos distintos e, em baixa gravidade, é capaz de atingir uma alta velocidade de locomoção através de saltos.
Uma outra novidade é a tentativa de integrar inteligência artificial nos robôs espaciais. O robô Cimon, desenvolvido pela Airbus em colaboração com a agência espacial alemã DLR, é capaz de se comunicar com astronautas na estação espacial e responder a perguntas e desafios usando o sistema Watson da IBM. As tarefas realizadas pelo Cimon são triviais – resolver um cubo de Rubik no espaço, auxiliar em experimentos com cristais –, mas demonstram o potencial da integração de robótica e inteligência artificial.
A perspectiva de um robô astronauta tal qual o B9, um robô autônomo e inteligente capaz de auxiliar astronautas, parece cada vez mais próxima. Em breve, a única dificuldade nessa área será ensinar paciência para astronautas aguentarem colegas robóticos gritando: "Perigo, Will Robinson!"


Sobre os autores
Monica Matsumoto é cientista e professora de Engenharia Biomédica no ITA. Curiosa, ela tem interesse em áreas multidisciplinares e procura conectar pesquisadores em diferentes campos do conhecimento. Monica é formada em engenharia pelo ITA e doutora em ciências pela USP, e trabalhou em diferentes instituições como InCor/HCFMUSP, UPenn e EyeNetra.
Shridhar Jayanthi é Agente de Patentes com registro no escritório de patentes norte-americano (USPTO) e tem doutorado em Engenharia Elétrica pela Universidade de Michigan (EUA) e diploma de Engenheiro de Computação pelo ITA. Atualmente, ele trabalha com empresas de alta tecnologia para facilitar obtenção de patentes e, nas (poucas) horas vagas, é um estudante de problemas na intersecção entre direito, tecnologia e sociedade. Antes disso, Shridhar teve uma vida acadêmica com passagens pela Rice, MIT, Michigan, Pennsylvania e no InCor/USP, e trabalhou com pesquisa em áreas diversas da matemática, computação e biologia sintética.







ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, assinante, ler e comentar.
Só assinantes do UOL podem comentar
Ainda não é assinante? Assine já.
Se você já é assinante do UOL, faça seu login.
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.